Lecture 22: Concurrent Stacks
Overview
- Concurrent Stacks
- Elimination
- Consensus
Last Time
Concurrent Queues:
- Unbounded with locks
- Unbounded lock-free
- Bounded with locks
Download and test the code yourself:
Today: The Stack
Basic operations
-
void push(T item)add a new item to the top of the stack -
T pop()remove top item from the stack and return it- throw
EmptyExceptionif stack was empty
- throw
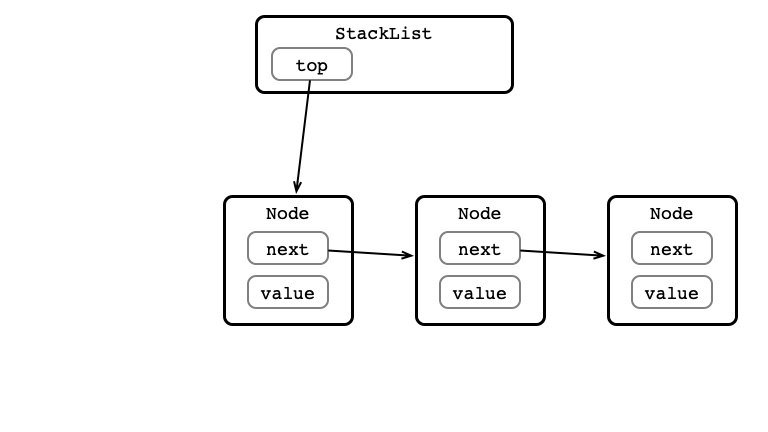
Linked List Implementation
push() Step 1: Create Node
push() Step 2: Set next
push() Step 3: Set head
push() Complete
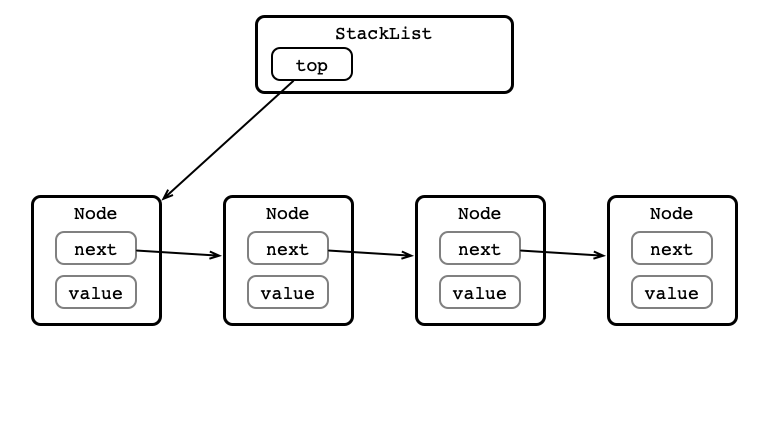
pop()?
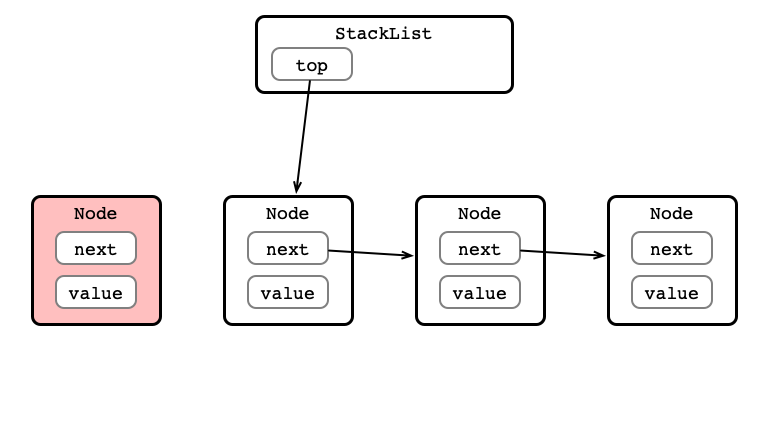
pop() Step 1: Store value
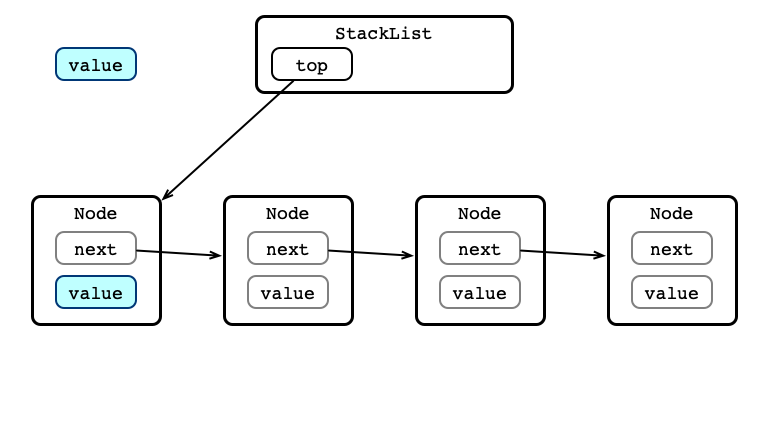
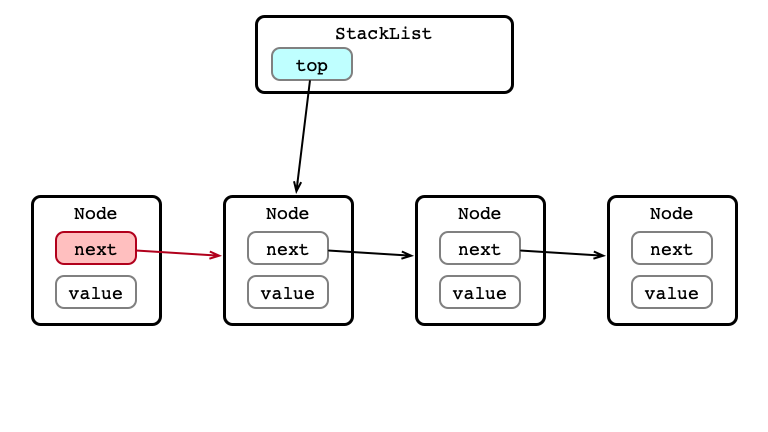
pop() Step 2: Update head
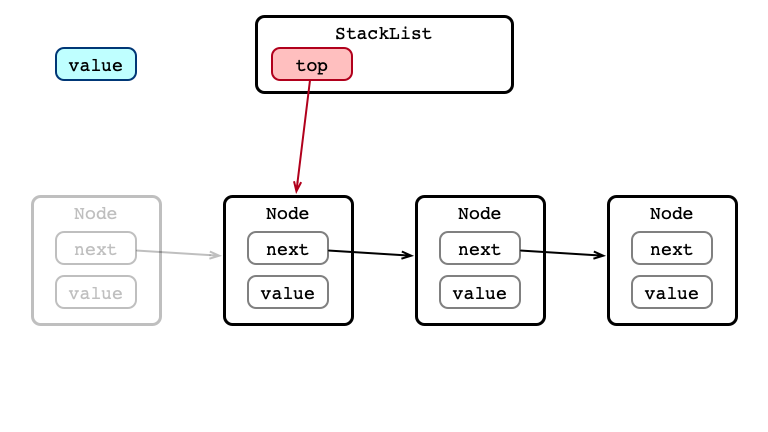
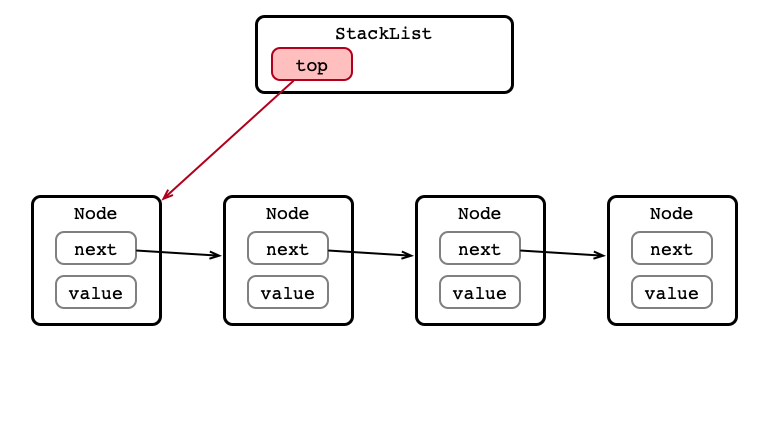
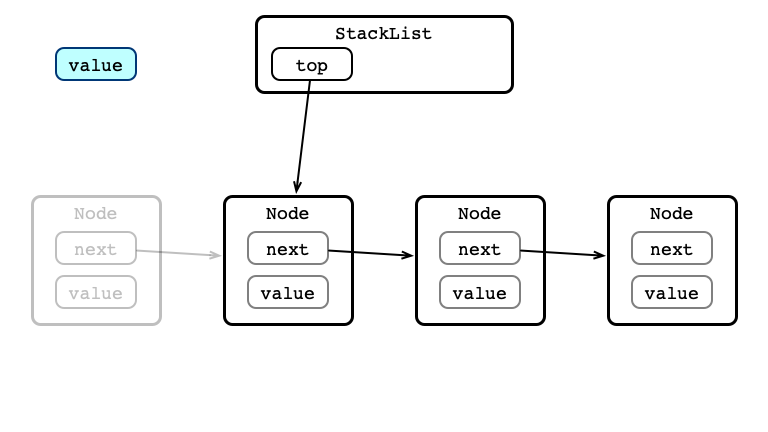
pop() Step 3: Return value
Concurrent Stack
With locks:
- Since all operations modify
head, coarse locking is natural choice
Without locks?
A Lock-free Stack
Use linked-list implementation
- Logic is simpler than queues’ because all operations affect same node
- Idea:
- store
topas anAtomicReference<Node> - use
compareAndSetto modifytop- success, or retry
- store
- Unlike queue:
- item on top of stack precisely when
toppoints to item’sNode
- item on top of stack precisely when
Implementing the Lock-Free Stack
public class LockFreeStack<T> implements SimpleStack<T> {
AtomicReference<Node> top = new AtomicReference<Node>(null);
public void push(T item) {...}
public T pop() throws EmptyException {...}
class Node {
public T value;
public AtomicReference<Node> next;
public Node(T value) {
this.value = value;
this.next = new AtomicReference<Node>(null);
}
}
}
Implementing push
public void push(T item) {
Node nd = new Node(item);
Node oldTop = top.get();
nd.next.set(oldTop);
while (!top.compareAndSet(oldTop, nd)) {
oldTop = top.get();
nd.next.set(oldTop);
}
}
Implementing pop
public T pop() throws EmptyException {
while (true) {
Node oldTop = top.get();
if (oldTop == null) {
throw new EmptyException();
}
Node newTop = oldTop.next.get();
if (top.compareAndSet(oldTop, newTop)) {
return oldTop.value;
}
}
}
Sequential Bottleneck
Modifying top
- No matter how many threads,
push/poprate limited bytop.compareAndSet(...) - This seems inherent to any stack…
… or is it?
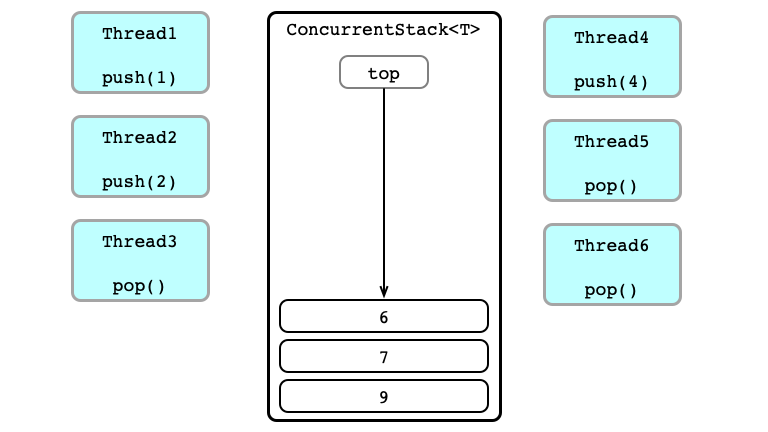
Elimination
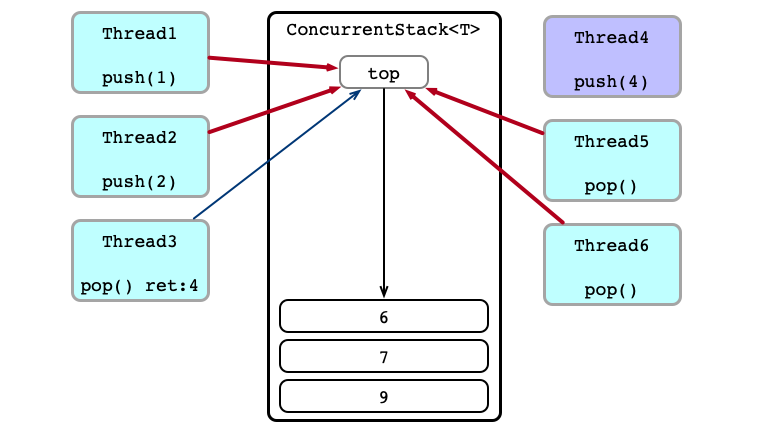
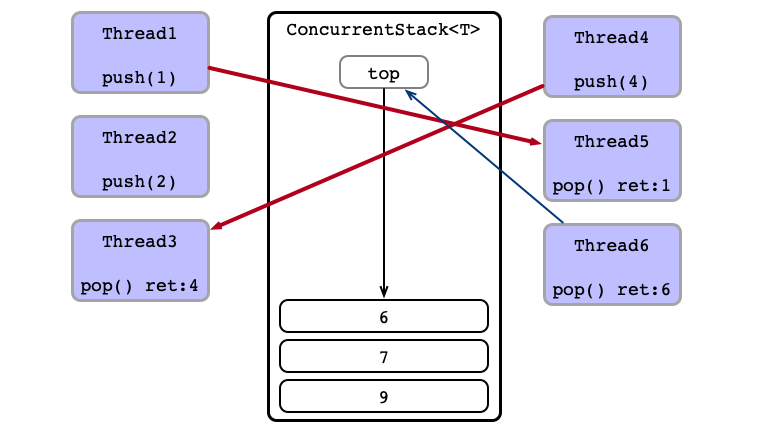
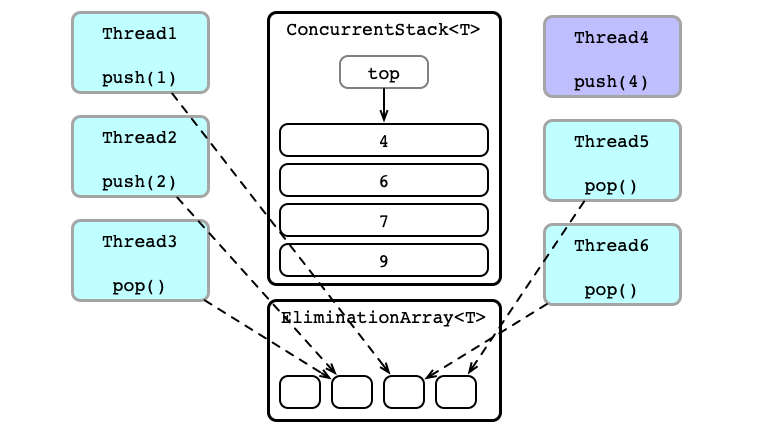
Consider several concurrent accesses to a stack:
- T1 calls
stk.push(item1) - T2 calls
stk.push(item2) - T3 calls
stk.pop() - T4 calls
stk.push(item4) - T5 calls
stk.pop() - T6 calls
stk.pop()
Trick Question. What is the state of stk after these calls? What do pop calls return?
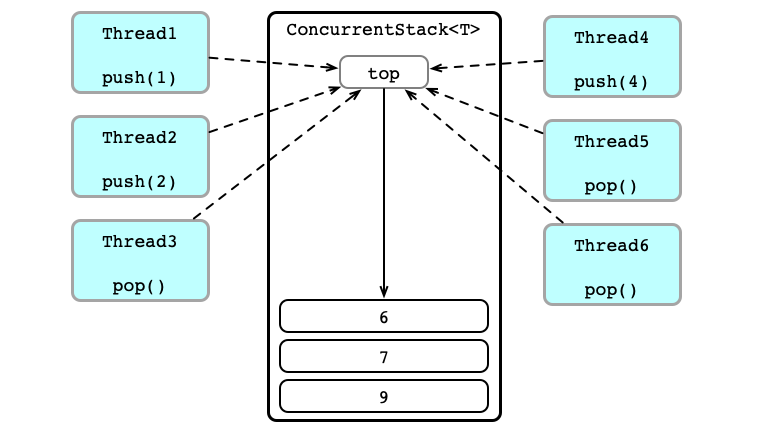
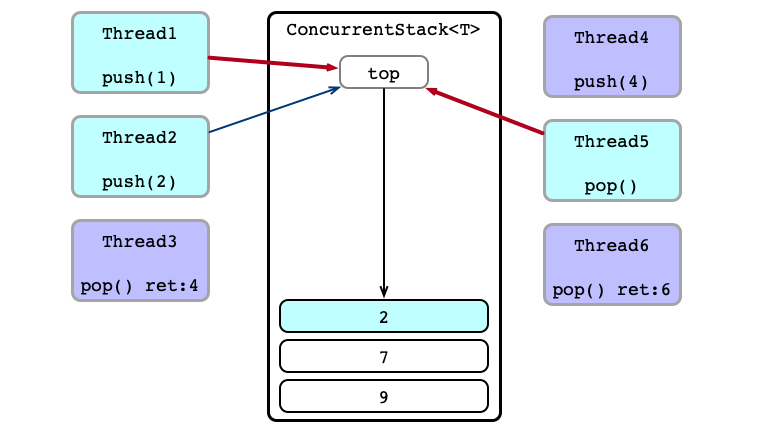
Concurrent Calls
Contention!
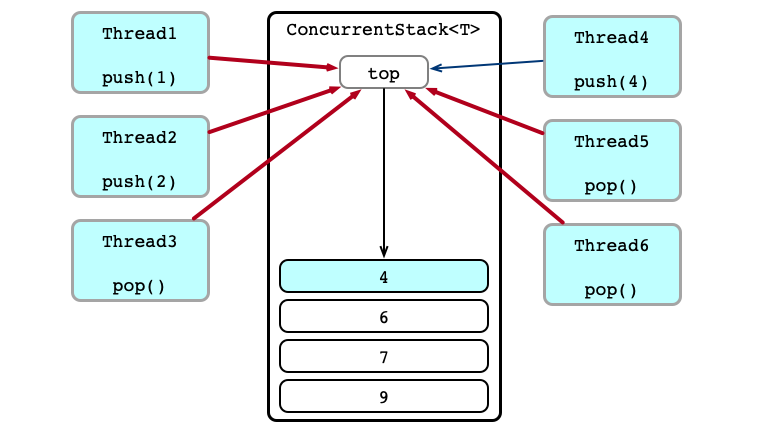
Thead 4 Wins
Contention!
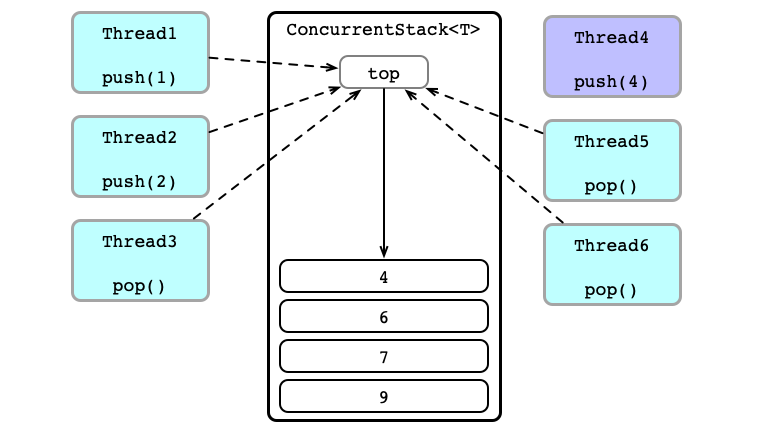
Thead 3 Wins
Contention!
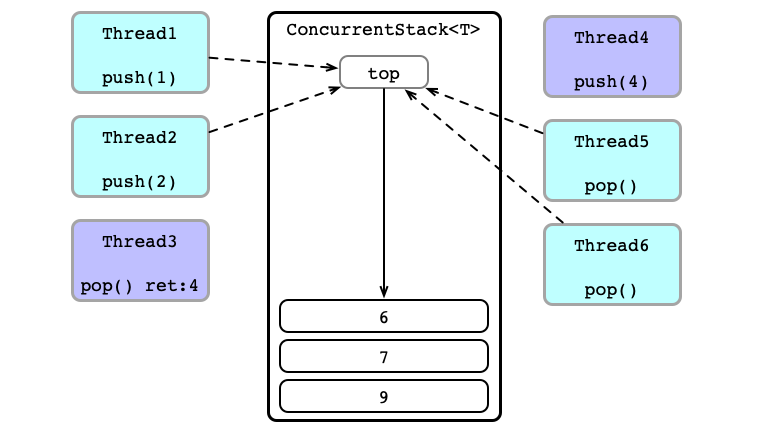
Thead 6 Wins
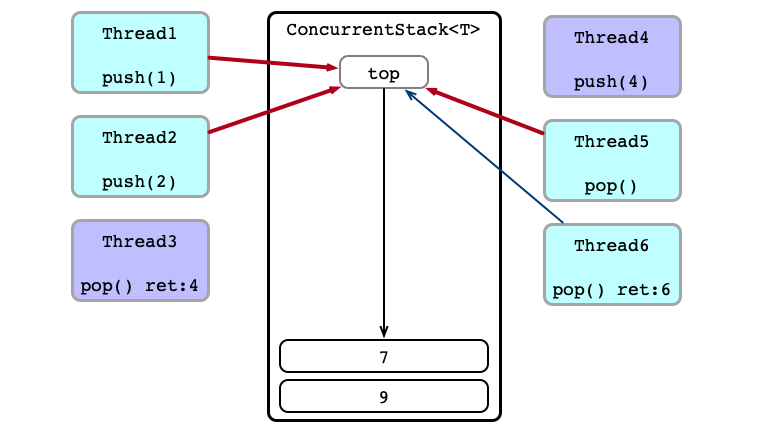
Contention!
Thead 2 Wins
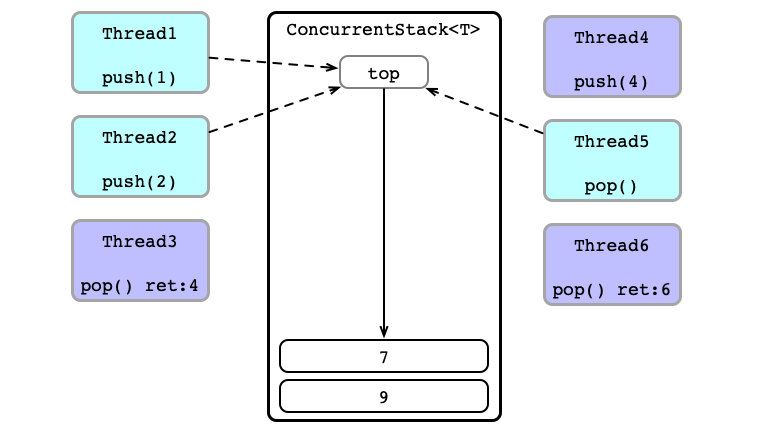
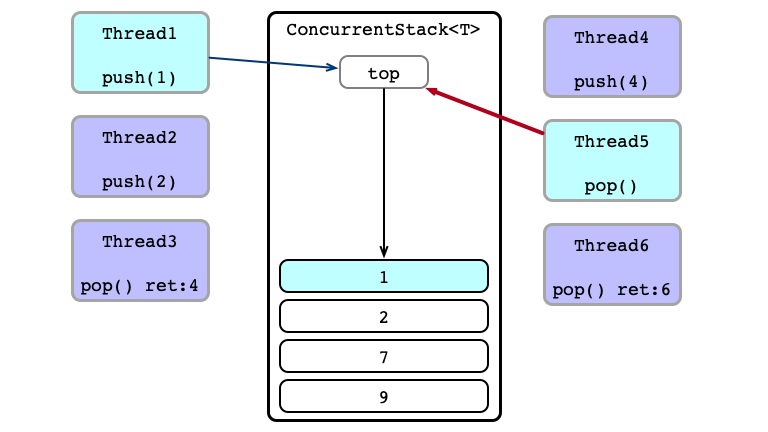
Contention!
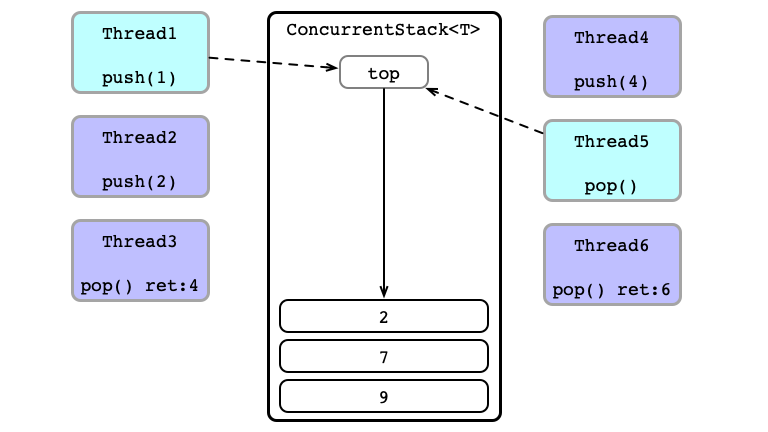
Thead 1 Wins
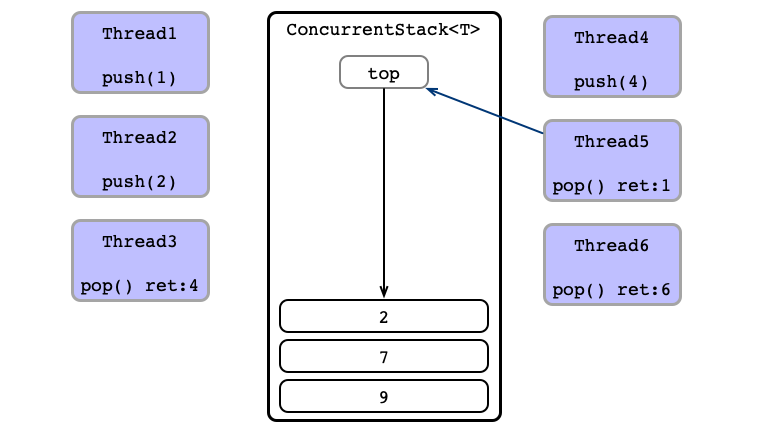
No Contention; Thread 5 Succeeds
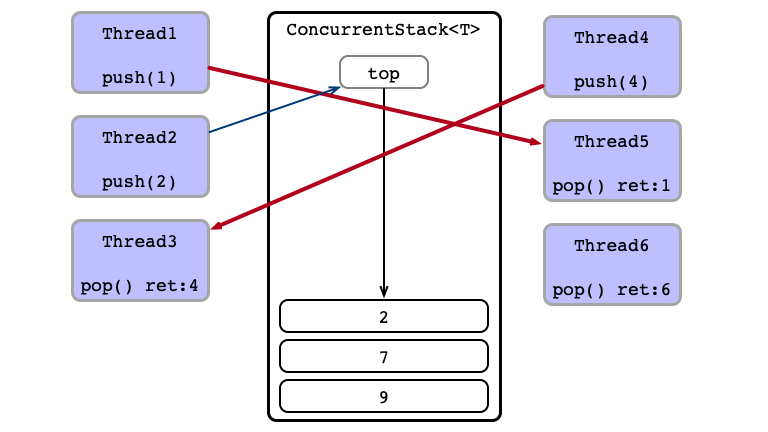
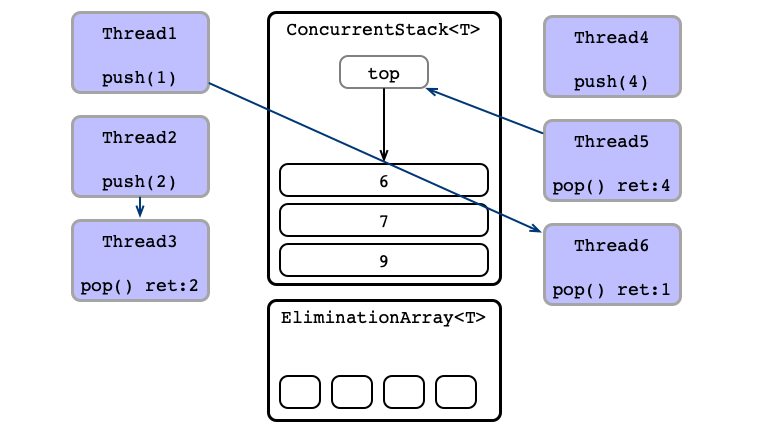
What do we need the stack for?
Equivalent Execution:
- Thread 6
pops - Thread 1 sends
1to Thread 5 - Thread 4 sends
4to Thread 3 - Thread 2
pushes2
Note: Steps 1, 2, and 3 can be performed in parallel!
Exchanges
Exchanges
Observation
- Stack operations cannot be parallelized
- Exchanges between threads can be!
The stack was just slowing us down
A Different Strategy
- Attempt to
push/popto stack- if success, good job
- If attempt fails there was contention; try to find a partner
- if
push, try to find apopand give them your value - if
pop, try to find apushand take their value
- if
This strategy is called elimination
- eliminate unnecessary calls to
push/pop
Need Another Object
The Exchanger object:
- Stores reference to item to be exchanged
- Has method
exchange(T item,...)-
...parameters for timeout
-
Specification of Exchanger<T> ex:
-
ThreadAcallsex.exchange(itemA,...) -
ThreadBcallsex.exchange(itemB,...) -
ThreadAreceivesitemB -
ThreadBreceivesitemA
Exchange Semantics
- Use
ex.exchange(null,...)to indicatepop - Use
ex.exchange(item,...)to indicatepush(item)
Exchange a success if:
-
ThreadAcallsex.exchange(item)- call returns
null(i.e., other call was apop)
- call returns
-
ThreadBcallsex.exchange()- call returns
item != null(i.e. other call waspush(item))
- call returns
Finding a Partner
Store an array of several Exchanger instances
- Attempt to
push/popto stack- if success, good job
- If attempt fails there was contention; try to find a partner
- pick random
Exchanger exin array - call
-
ex.exchange(null)forpop() -
ex.exchange(item)forpush()
-
- wait until success, or timeout
- timeout $\implies$ back to step 1
- pick random
Elimination Stack
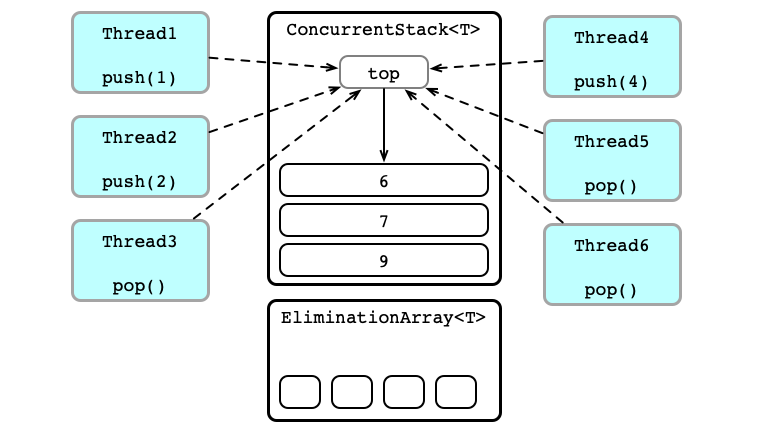
Witness Contention
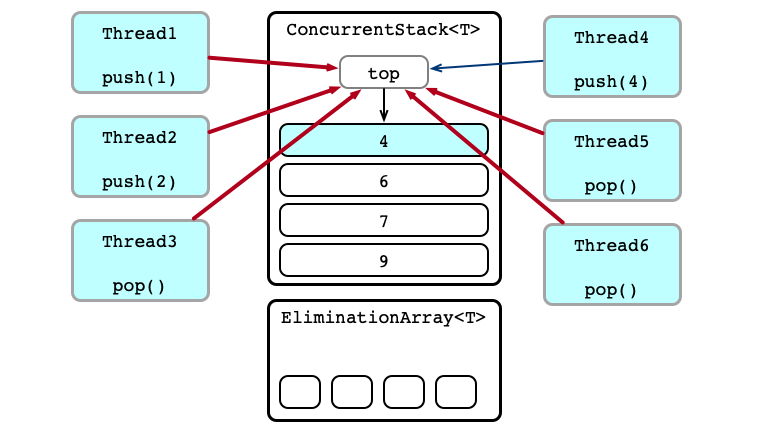
Attempt to Exchange
Some Exchanges Successful!
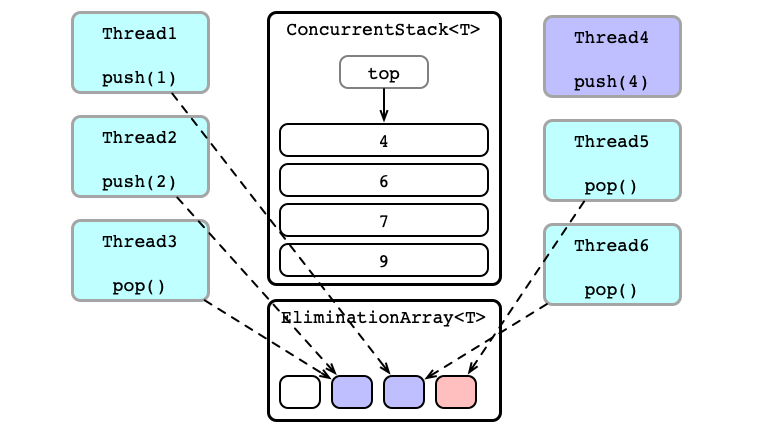
Unsuccessful Exchanges Try Again
Challenges
- Implementation (see AoMP Section 11.4)
- natural idea
- technically challenging
- Parameter tuning
- how large should
Exchangerarray be? - dynamic tuning?
- detect contention for exchangers, and use more?
- how large should
Question. When might this approach be practical?
Consensus
Mission Critical Components
Suppose you’re designing an airplane
- Need computers to control everything
- sensors for speed, thrust, flap positions, pitch, roll, yaw
- must adjust constantly to fly
- But computers occassionally (regularly) crash/need restart
How to design around this issue?
Fault-Tolerance through Duplication?
Have multiple duplicate, independent systems
- systems run in parallel
- highly unlikely both crash simultaneously
- restarts are infrequent
- restarting one system won’t affect other system
The end of our worries?
Trouble Ahead
Suppose all systems working normally, but
- system 1 says increase thrust
- system 2 says decrease thrust
- system 3 not responding (restart?)
What do we do?
The Problem of Consensus
Have multiple systems with different inputs
- For us, binary inputs
-
0= decrease thrust -
1= increase thrust
-
Goal:
- agree on same output
Requirements
Consensus Problem:
- Agreement: all systems output the same value
- Validity: if all systems have the same intput, they all output that value
- Termination: all (non-faulty) processes decide on an output and terminate after a finite number of steps
Coming up: How can we achieve consensus if some processes might fail?