Lecture 24: More Mazes
Last Time
How Can We Solve Mazes?
Suggested strategy:
- Store visited cells
- Pick a direction, and go until dead end
- walled in, or have already visited neighbors
- Backtrack until you see an unvisited neighboring node
- Continue in new direction
This strategy is depth-first
- Go as far as possible and backtrack
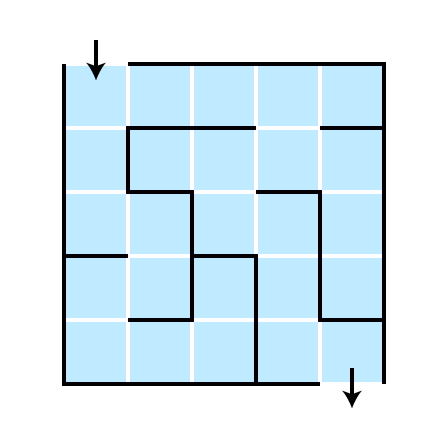
Strategy Illustrated
In More Detail
- fix an order on possible neighbors of cells
- e.g., right, down, left, up
- when visiting a cell:
- mark it as visited
- check if it is the goal
- if not, visit “next” unvisited neighbor
- if no unvisited neighbors, return to “parent” cell
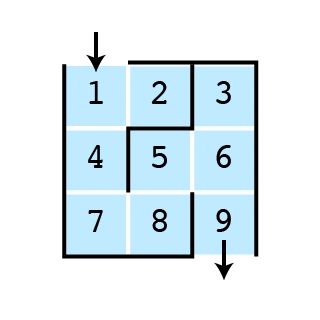
Representing a Maze in Code
-
Cellclass stores (among other things)- list of references to neighboring
Cells (those not separated by walls)
- list of references to neighboring
-
Mazeclass stores- 2d array of
Cells -
startandgoalcells
- 2d array of
How to Implement Solution?
- Store
visitedcells (How?) - Store
activecells (How?)- not yet exhausted
- forms path back to
start
Implementing Our Solution Strategy
- use an
ArrayListto keep track ofvisitedcells - use a stack to keep track of
activecells-
activecells form a path fromstartto current cell - when we visit a new cell, push it to the stack
- when we’ve explored all neighbors (and haven’t found the goal):
- pop current cell off stack
- return to previous cell on stack—cell from which we initially visited current cell
-
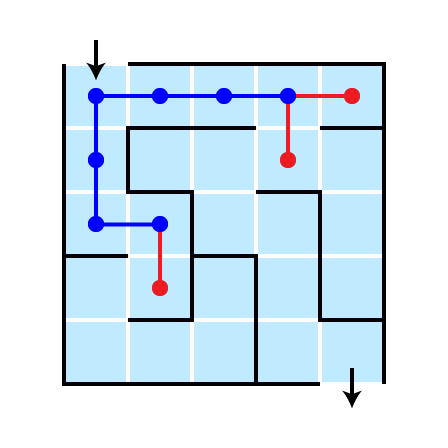
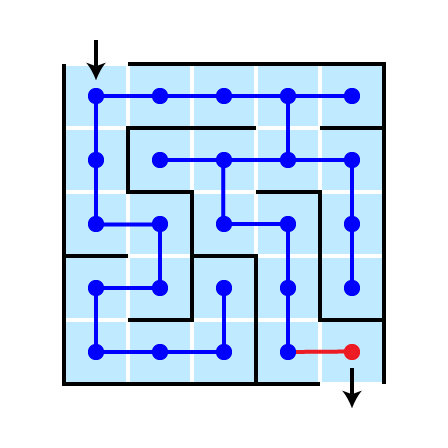
Illustration
Recursion: Our Old Friend
Use a stack an find goal recursively
- write method
boolean solve (Stack<Cell> active, ArrayList<Cell> visited) {...}
How?
Stack-based solution
- idea: try to find
goalfromcurrentcell (top ofactive)- if
currentisgoal, returntrue - otherwise, find
goalfrom unvisited neighbors:- push neighbor onto
activestack and add neighbor tovisited - call
solveto continue exploration from new neighbor
- push neighbor onto
- if recursive call to
solvereturnstrue, we should returntruetoo - if exploration fails to find anything pop
currentoff stack and returnfalse
- if
When goal is found, active will contain the path from start to goal
Solution in Code
Question
Some of our solutions were really inefficient!
- goal could be adjacent to start, but a much longer path from start to goal is found
How could we ensure that we find the shortest path from start to goal?
Another Strategy
Explore in all directions simultaneously!
- Consider all possible first steps
- Then all possible second steps
- ignore previously visited cells
- …
This strategy is breadth first
- Explore all possible next steps
Illustration: Depth 1
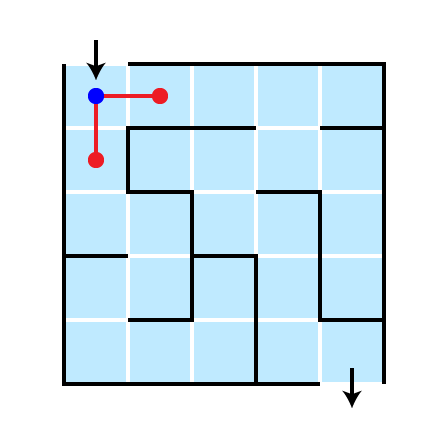
Illustration: Depth 2
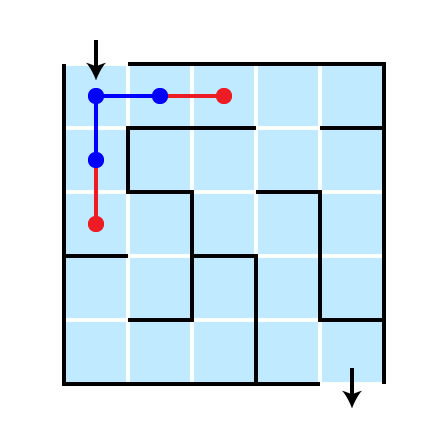
Illustration: Depth 3
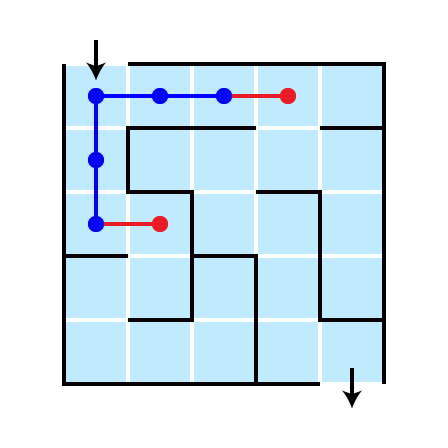
Illustration: Depth 4
Completed Search
Return Solution
A Nice Feature
The shortest path from start to goal is found
- why?
Implementation Notes
- again, store
visitedandactive -
activecells are boundary betweenvisitedand unvisited - store
activecells in a queue- all cells at distance $d$ from start are visited before any cell at distance $d+1$ is visited
- initially,
activeandvisitedare just starting cell - each cell stores its
parentcell-
parentis cell from which cell was visited
-
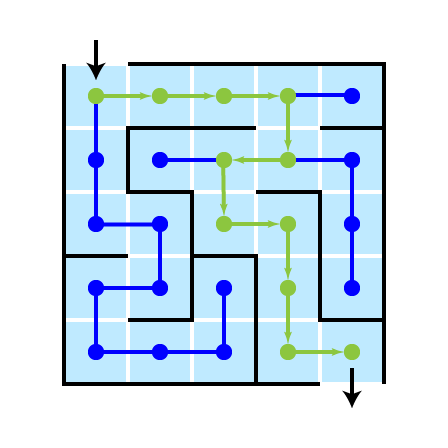
Breadth-first Illustration
Breadth-first in Code
Two Solution Philosophies
- Depth-first
- Keep going until you can’t go any farther, then backtrack
- Naturally suited to stack ADT
- Naturally suited to recursive solution
- Breadth-first
- Exhaustively search all cells in increasing